
« ロボットアーム遠隔操作Flash再度テスト中 | メイン | ARMSTROBOTあれこれ »
February 15, 2008
ロボットアーム遠隔操作フラッシュ、「Armstrobot」概要
Armstrobotは遠隔操作でロボットアームを動かすFlashです。ロボットアームは指、手首、肘、肩、土台が稼動部になっています。

制御はGPSSを使って作られた集合愚型制御装置Flashで行います。動かしている人が一人の場合はその人の思い通りに動きますが複数人いる場合は多数決によって動作が決定されます。
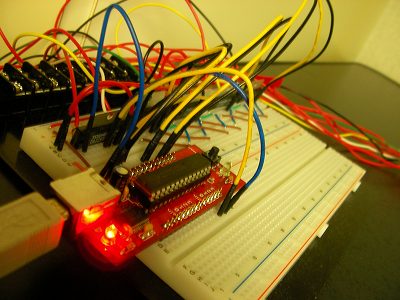
ロボットアームをどのように動かしているのかというとロボットアームとGainerを接続して制御しています。DCモータ用フルブリッジドライバを稼動部の数だけ繋げ、電源はACアダプタから供給。
映像はスティッカムで配信。日本のサービスだから海外のUstreamよりも多分遅延が少ないだろうという理由で。慣れればブロックを掴むということぐらいは出来る程度の遅延なのでこのままスティッカム使うかな。

ちなみに装置はこんな感じです。かなり悲惨です。
トラックバック
このエントリーのトラックバックURL:
http://yarukinoki.net/cgi/mt/mt-tb.cgi/256